-
Latent Points
-
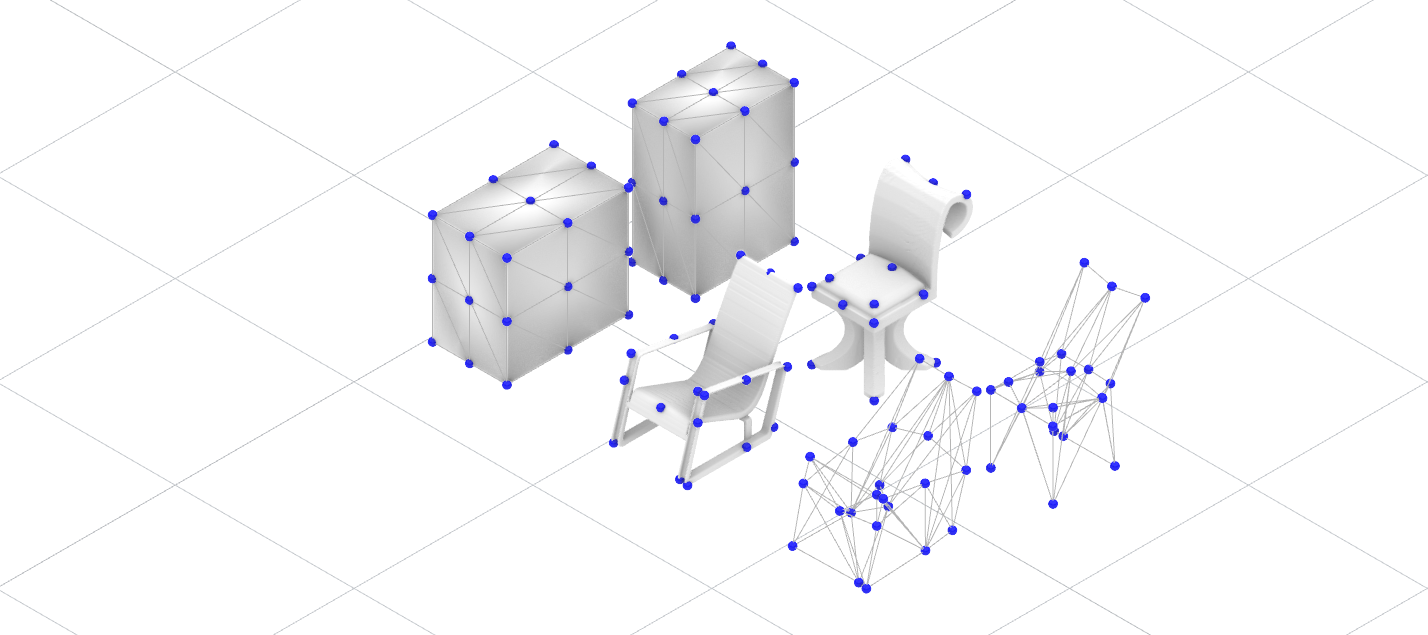
Embedding Vector \(\mathbf{z} \in \mathbb{R}^{N \times 78}\) has to have informations about shapes
-
\(N\) is the number of shapes, \(78\) dimensions are reshaped to latent points \(p \in \mathbb{R}^{26 \times 3}\)
-
UI that can interpolate shapes by moving points
 Latent Points
Latent Points
-
Latent points computation
def _compute_latent_points(self, mesh: trimesh.Trimesh) -> np.ndarray:
box_mesh = trimesh.creation.box(bounds=mesh.bounds)
box_mesh.vertices = box_mesh.vertices @ np.array([[0.95, 0, 0], [0, 0.95, 0], [0, 0, 1]])
box_mesh_subdivided = box_mesh.subdivide()
(min_x, min_y, min_z), (max_x, max_y, max_z) = box_mesh.bounds
nearest_indices = []
for i, vertex in enumerate(box_mesh_subdivided.vertices):
is_bottom_edge_midpoint = (
np.allclose(vertex, (np.array([min_x, min_y, min_z]) + np.array([max_x, min_y, min_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, max_y, min_z]) + np.array([max_x, max_y, min_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, min_y, min_z]) + np.array([max_x, max_y, min_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, min_y, min_z]) + np.array([min_x, max_y, min_z])) * 0.5)
or np.allclose(vertex, (np.array([max_x, min_y, min_z]) + np.array([max_x, max_y, min_z])) * 0.5)
)
is_top_edge_midpoint = (
np.allclose(vertex, (np.array([min_x, min_y, max_z]) + np.array([max_x, min_y, max_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, max_y, max_z]) + np.array([max_x, max_y, max_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, min_y, max_z]) + np.array([max_x, max_y, max_z])) * 0.5)
or np.allclose(vertex, (np.array([min_x, min_y, max_z]) + np.array([min_x, max_y, max_z])) * 0.5)
or np.allclose(vertex, (np.array([max_x, min_y, max_z]) + np.array([max_x, max_y, max_z])) * 0.5)
)
if is_bottom_edge_midpoint or is_top_edge_midpoint:
ray_origin = vertex
ray_direction = np.array([0, 0, 1])
if is_top_edge_midpoint:
ray_direction *= -1
locations, *_ = mesh.ray.intersects_location(
ray_origins=[ray_origin],
ray_directions=[ray_direction]
)
if len(locations) > 0:
new_vertex = locations[0]
box_mesh_subdivided.vertices[i] = new_vertex
else:
nearest_indices.append(i)
else:
nearest_indices.append(i)
nearest_vertices = mesh.nearest.on_surface(box_mesh_subdivided.vertices[nearest_indices])[0]
box_mesh_subdivided.vertices[nearest_indices] = nearest_vertices
return box_mesh_subdivided.vertices